Shunlongwei Co. ltd.
IGBT Module / LCD Display Distributor
Customer Service
+86-755-8273 2562
IGBT Module / LCD Display Distributor
“Because electromagnetic waves propagate along a straight line, the limitations of the curvature of the earth and the influence of mountains cause blind spots in radar detection, and low-altitude and ultra-low-altitude flying targets cannot be seen. Therefore, low-altitude targets bring difficulties and threats to radar detection. In order to detect and detect mid- and low-altitude, especially ultra-low-altitude and high-speed intrusion helicopters, armed helicopters, etc., it is necessary to solve the problem of long-range detection of targets.
“
Because electromagnetic waves propagate along a straight line, the limitations of the curvature of the earth and the influence of mountains cause blind spots in radar detection, and low-altitude and ultra-low-altitude flying targets cannot be seen. Therefore, low-altitude targets bring difficulties and threats to radar detection. In order to detect and detect mid- and low-altitude, especially ultra-low-altitude and high-speed intrusion helicopters, armed helicopters, etc., it is necessary to solve the problem of long-range detection of targets.At present, several measures are mainly adopted, such as the development of low-altitude blind compensation radar, the use of aerial platform surveillance radar systems (such as airborne early warning system, tethered balloon-borne radar system, airship-borne radar surveillance system, etc.), and improvement and enhancement of the low-altitude detection performance of the radar. Increase the radar’s range of air and sea alert[1]. These measures have effectively increased the radar’s air and sea alert range, but have caused a large-scale increase in defense costs, and the exposure of radar carrier targets to be easily attacked by the other party. At the same time, there are still detection blind spots, so that the security defense system has a certain degree. The hidden dangers.
In response to the above problems, this paper proposes to use the MSP430F133 embedded microprocessor to design a distributed multi-sensor detection node, which can be randomly and dispersedly set in the blind area of the radar system, using the GPS system for timing and positioning, and using the multi-sensor to provide observation data, Use GPRS network and Internet for multi-sensor information fusion, real-time target discovery, optimization and comprehensive processing, acquisition of state estimation, target attributes, behavioral intentions, situation assessment, threat analysis and auxiliary decision-making, etc., which can make up for the deficiencies of radar defense systems , To eliminate hidden dangers in the security defense system[2-4].
Overall framework of distributed multi-sensor information fusion system
The entire distributed multi-sensor information fusion system is composed of several irregularly distributed multi-sensor detection nodes, INTERNET network, monitoring center server, switch, database server, application server, multi-sensor information fusion terminal and detection node control terminal. The structure is shown in Figure 1.
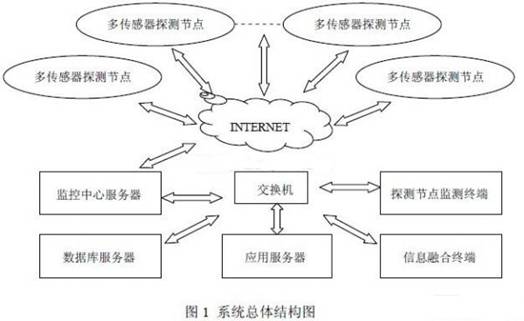
When the detection target enters the area detectable by the multi-sensor detection node, the detection node will transmit the data packet through the communication module (GPRS module), wirelessly transmit it to the GPRS network, and then transmit the data to the monitoring center server via the INTERNET network.
The monitoring center server receives the information transmitted from each detection node in real time, and exchanges data with the database server, application server, multi-sensor information fusion terminal and detection node control terminal through the switch.
The information fusion terminal processes the data received by the monitoring center server and exchanges data through other servers to achieve information fusion, real-time target discovery, optimization and comprehensive processing, to obtain state estimation, target attributes, behavioral intentions, situation* assessment, and threat analysis And auxiliary decision-making, etc.
The detection node control terminal transmits various instructions to each detection node, monitors the operation status of each detection node, and controls each detection node in real time.
The hardware part of the distributed sensor detection node is mainly composed of communication module (GPRS module), GPS module, storage module, power supply module, clock module, reset module, various sensors and embedded microprocessor. Its hardware structure is shown in Figure 2.
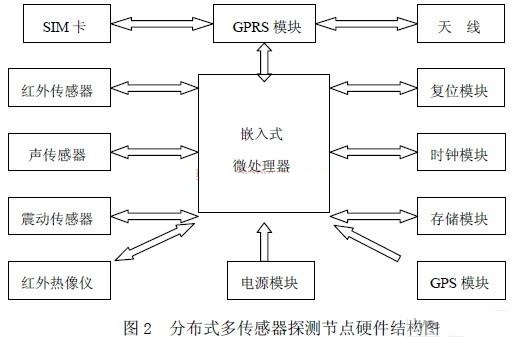
The microprocessor chooses the 16-bit single-chip MSP430F133 produced by Texas Instruments, which has strong chip processing capability and fast running speed, and adopts advanced technologies such as JTAG technology and FLASH online programming. Its on-chip resources are rich, including 8KB FLASH memory, and UART interface, which can be used for asynchronous or synchronous communication, and serial communication can also be realized through Timer-A software.
The communication module is the GPRS module, which uses the GR47 produced by Sony Ericsson. The module is embedded with TCP/IP protocol, supports SMS, GPRS, CSD and other transmission methods, and provides SIM card interface and three-channel serial data communication interface (UART1, UART2 and UART2). UART3). The module supports the AT command set and has two working states: command state and online state. When in the command state, the module receives the instructions sent by the MCU through the serial port; when in the online state, that is, in the data mode, data transmission can be performed, and it does not respond to commands at this time , Directly transmit the received data. The module is small in size, easy to develop, and has a built-in TCP/IP protocol stack, so users do not need to develop complex TCP/IP protocol stack software by themselves, which greatly reduces the difficulty of development and shortens the product development cycle to the greatest extent. This module requires a SIM card with GPRS service enabled, and it is used in conjunction with it.
The storage module uses 24C256 memory to store some important data, which cannot be lost after the system is powered off. It mainly stores the IP and port number of the detection center, password, collected data, etc. The power module is a lithium battery that uses solar batteries and is backed up. The power supply part adds some necessary filtering and voltage conversion Circuits to finally output 3 groups of DC power of 24V, 12V and 5V for use by various sensors and microprocessors.
The GPS module uses the GPS system to perform timing and positioning on the distributed multi-sensor detection nodes. While determining the exact location of each detection node, it ensures that the time of each detection node is highly consistent.
The sensor part dynamically sets corresponding sensors according to different application environments, and completes target detection, discovery, recognition, positioning and image shooting with high reliability. With the development of anti-reconnaissance technology, it is difficult for a single sensor to detect targets effectively, and multiple sensors must be used for detection. In ultra-low altitude areas below several hundred meters, infrared sensors, acoustic sensors, vibration sensors, etc. can basically effectively detect and identify targets entering the area, and capture images through infrared thermal imaging cameras to more accurately determine targets. Good information fusion.
Software Design of Distributed Multi-sensor Detection Node
The software part is mainly composed of two parts: multi-sensor data acquisition and GPRS remote data communication. The multi-sensor detection data acquisition and processing part detects and recognizes the target information in the area in real time, and is transformed into relevant transmission data by the microprocessor; the GPRS remote data communication part communicates with the monitoring center server through GPRS in real time.
4.1 Multi-sensor detection data collection and processing
Multi-sensor detection data collection refers to the AD conversion values output by infrared sensors, acoustic sensors, vibration sensors, etc. during a collection cycle during the operation of the detection node. The microprocessor preprocesses the collected data. If suspicious target information is found, the infrared thermal imaging camera is started to capture the target image, and then all the collected parameters and image data are transmitted to the monitoring center server.
In the process of data transmission, since each parameter data is not transmitted independently, firstly, all data must be encoded and packaged in sequence using the TLV (identification, length, data) format. Then, the packaged data is divided into blocks with a fixed length. The purpose of block division is to ensure that the length of the data sent to the network each time is moderate and easy for network transmission. Then call the data transmission subroutine to send each block of data sequentially.
In the data transmission subroutine, the original data block is sequentially encapsulated by the application layer data transmission command message, the transport layer UDP packet, the network layer IP packet and the link layer PPP frame message, and then sent to the GPRS module and sent to the network . The transport layer adopts the UDP (User Datagram Protocol) protocol, which is a connection-oriented transport protocol. It has no response mechanism and command retransmission mechanism. It is a small, resource-saving transport layer protocol with fast transmission speed. . And we use the response and retransmission mechanism at the application layer, so we can ensure that the data is received. The network layer uses the IP protocol. The IP header contains the local IP address and the IP address of the monitoring center, indicating the data transmission path.
4.2 GPRS remote data communication
There are generally three ways to use the GPRS module to access the Internet for data transmission. One is to use a public network static IP. The connection operation is simpler and has higher reliability and stability. However, the application and use of the static IP requires a higher cost; The second is to use dynamic IP combined with DNS domain name resolution. The IP may be different each time you go online, but you can establish an association between the terminal and the backend through DNS dynamic domain name resolution. The third is to use the APN dedicated line access method and apply for APN dedicated line connection Enter the GPRS network, and then assign a fixed IP to each module to form a private wide area network. This method also requires a higher cost.
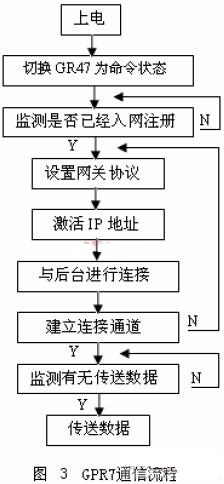
This system uses the second method to obtain its own IP, and the IP of the back-end monitoring center server is fixed. When using the GPRS module to access the Internet, the GPRS module first completes the dial-up login, and then performs data transmission. Figure 3 shows the processing flow of realizing dynamic IP mode Internet communication.
Concluding remarks
The innovation of this article is: the use of GPRS network as a remote wireless data communication platform can give full play to the advantages of general wireless packet service data transmission, and collect the information detected by remotely distributed multi-sensor detection nodes in real time and effectively. Ultra-long-distance information fusion enables real-time target discovery, optimization and comprehensive processing, and acquisition of state estimation, target attributes, behavioral intentions, situation* estimation, threat analysis, and auxiliary decision-making.
This project has good economic and social benefits. It can be easily deployed in the blind zone of the radar defense system. It can conduct mid- and long-distance control of targets that are difficult to detect and track by radar defense systems such as low-altitude and ultra-low-altitude flying*, armed helicopters, etc. Early warning can make up for the deficiencies of the radar defense system and eliminate the hidden dangers of the radar security defense system. At the same time, it can also be widely used in the security of important military and civilian departments such as border checkpoints, nuclear power plants, and oil exploration, and the indiscriminate exploitation, theft, and deforestation of important mining resources and forest resources that are strictly prohibited by the state. The benefit is more than RMB 10 million.
The Links: SKM75GB128D 6R1TI30Y-080